Publications A Probabilistic Graphical Model Foundation for Enabling Predictive Digital Twins at Scale We have proposed a unifying mathematical foundation for digital twins, with the goal of moving from the one-off digital twin to accessible and robust digital twin implementations at scale.
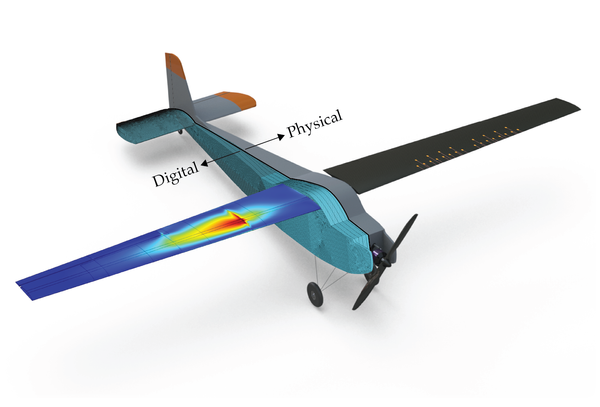
Publications Toward a Self-Aware UAV: Predictive digital twins via reduced-order models and interpretable machine learning This post introduces my PhD work developing a predictive digital twin of an unmanned aerial vehicle (UAV). I presented this work at the AIAA Scitech conference in January 2020, where our paper was
Blog Project: Implementing and testing geometric control on the Intel Aero Drone This post showcases a class project I completed for MIT course 16.S398: Visual Navigation for Autonomous Vehicles (VNAV) in Fall 2018, taught by Prof. Luca Carlone. This was a really fun project,