This post introduces my PhD work developing a predictive digital twin of an unmanned aerial vehicle (UAV). I presented this work at the AIAA Scitech conference in January 2020, where our paper was awarded the Southwest Research Institute Student Paper Award in Non-Deterministic Approaches. The paper was also awarded the AIAA Multi-Disciplinary Optimization (MDO) Best Paper award for 2020.
For more details, see the full paper "Toward predictive digital twins via component-based reduced-order models and interpretable machine learning", or the slides for my presentation at AIAA Scitech. A preprint that includes more detail on the interpretable machine learning side of this work is also available on arXiv. More information can also be found on our research group website.
Motivation
Unmanned aerial vehicles (UAVs) are poised to become ubiquitous in a wide range of industries, with applications including inspection, agriculture, disaster relief, package delivery, and urban air mobility (a.k.a. air taxis!). It is critical that these UAVs are capable of monitoring their structural health. A self-aware UAV is capable of detecting, characterizing and responding intelligently to changes in it's structural health. This self-awareness will increase the safety and reliability of UAVs by avoiding structural failure, while also improving the efficiency and utilization of the UAV.
We seek to enable this capability by creating a Digital Twin of the UAV: a comprehensive virtual model that evolves alongside the UAV and captures it's structural health throughout its existence.
Project Overview
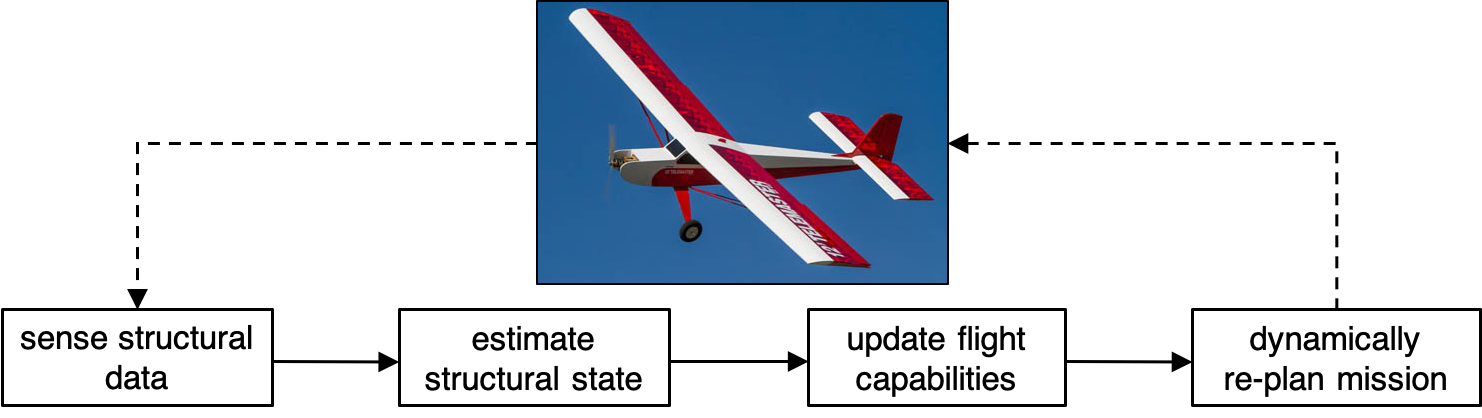
I am working on developing computational methods and algorithms that enable creation of a Predictive Digital Twin. We combine scientific machine learning with predictive physics-based models. Component-based reduced-order modeling makes the approach computationally efficient and scalable, while interpretable machine learning methods enable reliable data-driven decision-making. We combine these technologies to build a structural Digital Twin that is updated in near real-time based on sensed structural data, and is used to drive dynamic flight planning decisions.
Hardware Platform
Although the methods we develop can be applied to a wide range of physical assets, our testbed for this research is a custom-built 12ft wingspan fixed-wing UAV, developed in collaboration with Aurora Flight Sciences. This UAV is outfitted with a suite of structural sensors such as strain gauges, accelerometers, and high frequency vibration sensors.

Physics-based digital twin
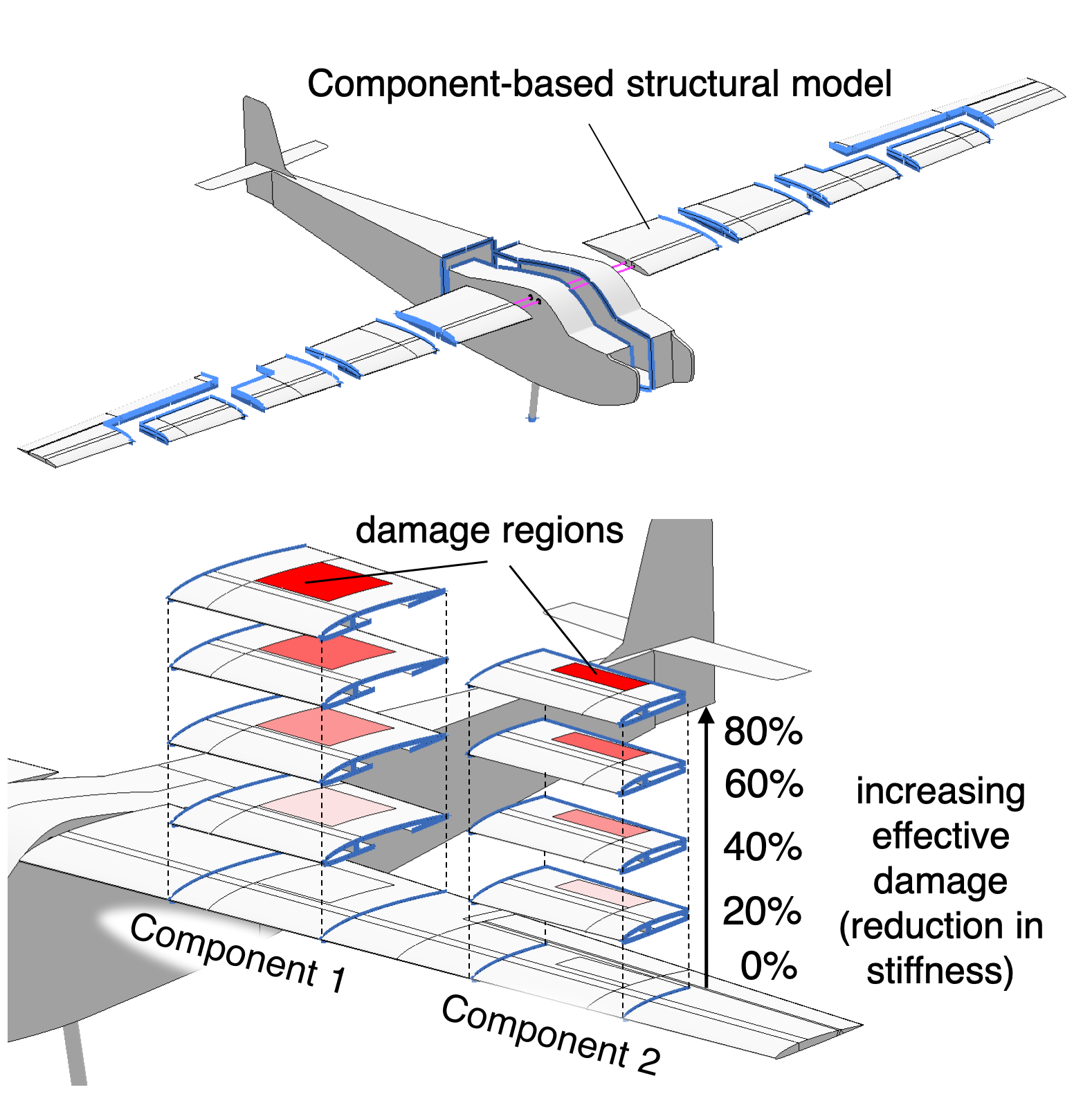 At the heart of our digital twin is a library of physics-based models, each representing a different structural state. Through a collaboration with Akselos, we adopt a component-based reduced-order modeling approach, so that these physics-based models are accurate and fast to evaluate, even at the scale of the full UAV structure.
At the heart of our digital twin is a library of physics-based models, each representing a different structural state. Through a collaboration with Akselos, we adopt a component-based reduced-order modeling approach, so that these physics-based models are accurate and fast to evaluate, even at the scale of the full UAV structure.
We model different damage states by creating multiple versions of each component in the model. Each version has a different damage state. In this example we create five copies of two components in the right wing of the UAV. Each copy has a reduction in stiffness of between 0% (pristine case) and 80% (worst damage case).
In flight, we use on-board structural sensor data to estimate which model best matches the current state of the UAV, and use this model in the digital twin. This ensures that the digital twin is constantly updated to reflect the current state of the UAV.
Interpretable Machine Learning
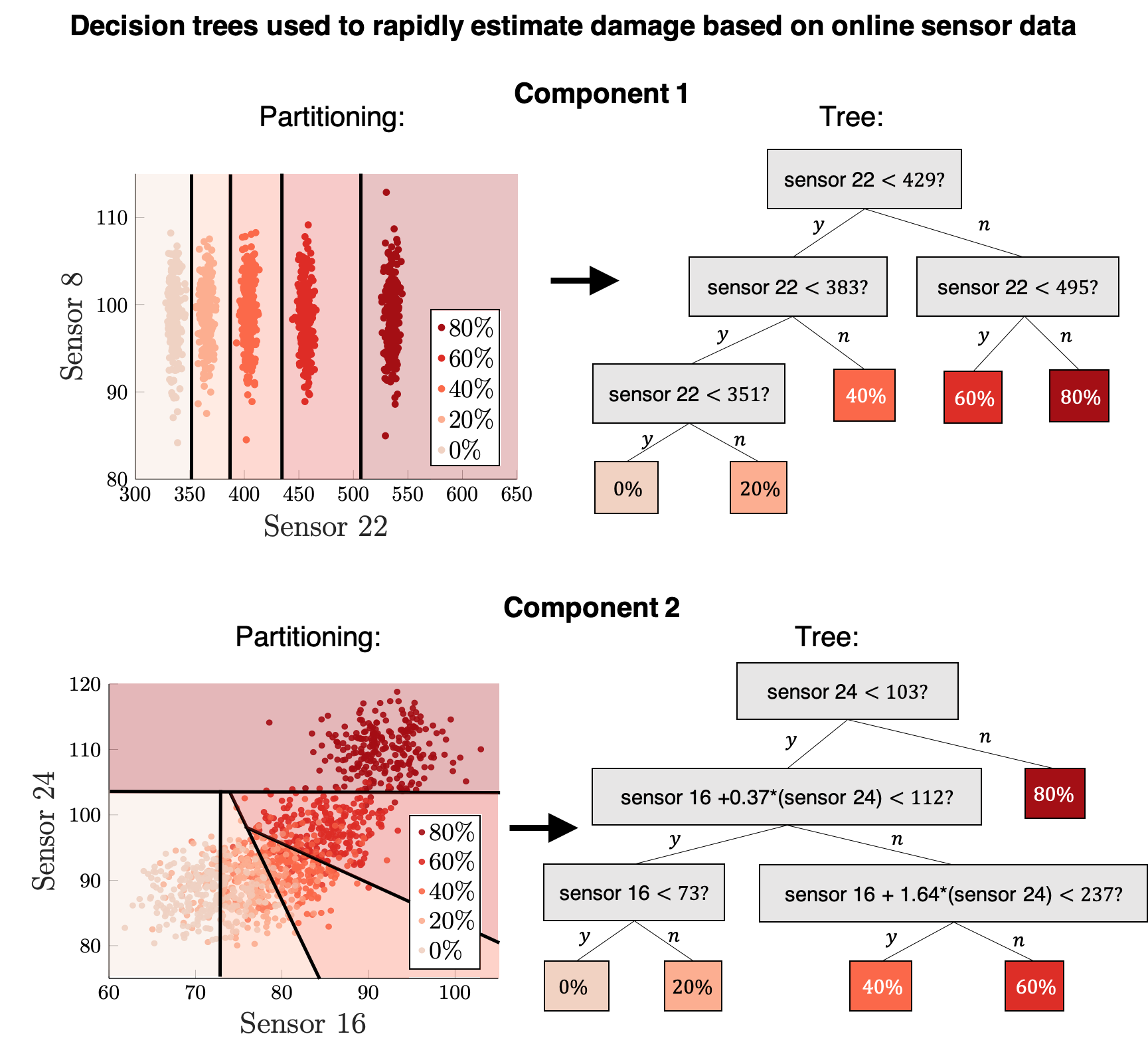
We use interpretable machine learning to train an optimal classification tree that predicts which model from the library best matches a set of structural measurements. These trees partition the space of sensor measurements so that each resulting region corresponds to a particular damage state.
When a new sensor measurement is acquired, we use the classification tree to decide which damage state best matches the data. The classification tree is interpretable because explicitly characterizes decision boundaries and it naturally enables sparse sensing.
Dynamic Decision Making
We demonstrate the benefits of our approach on an illustrative UAV scenario. In this scenario, the UAV must fly safely through a set of obstacles to a goal location while accumulating structural degradation. The UAV must choose either an aggressive flight path or a more conservative path around each obstacle. The aggressive path is faster, but requires the UAV to make sharp turns that subject the UAV to high structural loads. In contrast, the more conservative route is slower but subjects the UAV to lower structural loads. In pristine condition, the aircraft structure can safely withstand the higher loading, but as the aircraft wing accumulates damage or degradation the high load may lead to structural failure.
Our self-aware UAV uses the rapidly updating digital twin in order to monitor its evolving structural state and dynamically estimate its flight capability. Based on these capability estimates the UAV is able to dynamically replan the mission in order to maximize speed while avoiding structural failure.
Thanks for reading! If this article was useful for your own work, please be sure to cite our research paper:
Kapteyn, M., Knezevic, D. and Willcox, K., Toward predictive digital twins via component-based reduced-order models and interpretable machine learning. In proceedings of 2020 AIAA Scitech Forum and Exhibition, Orlando, FL, January 2020.